UR15
UR15は最大速度5 m/sを実現、サイクルタイムの短縮と生産性向上を可能にします。UR15は、これまで困難だったさまざまな作業の自動化に対応するように設計されています。
リーチ
1300 mm /51.2 in
可搬重量
最大 15 kg/33.1 lb ※条件により 17.5 kg(38.5 lb)まで対応可
重量
40.7 kg/89.7 lb
据付面積
φ200 mm
内蔵カメラ
なし
繰り返し精度
±0.05 mm
IP分類
アーム本体:IP65
ティーチペンダント:IP54
コントロールボックス:IP44
付属品

コントロールボックス

ティーチペンダント
特徴
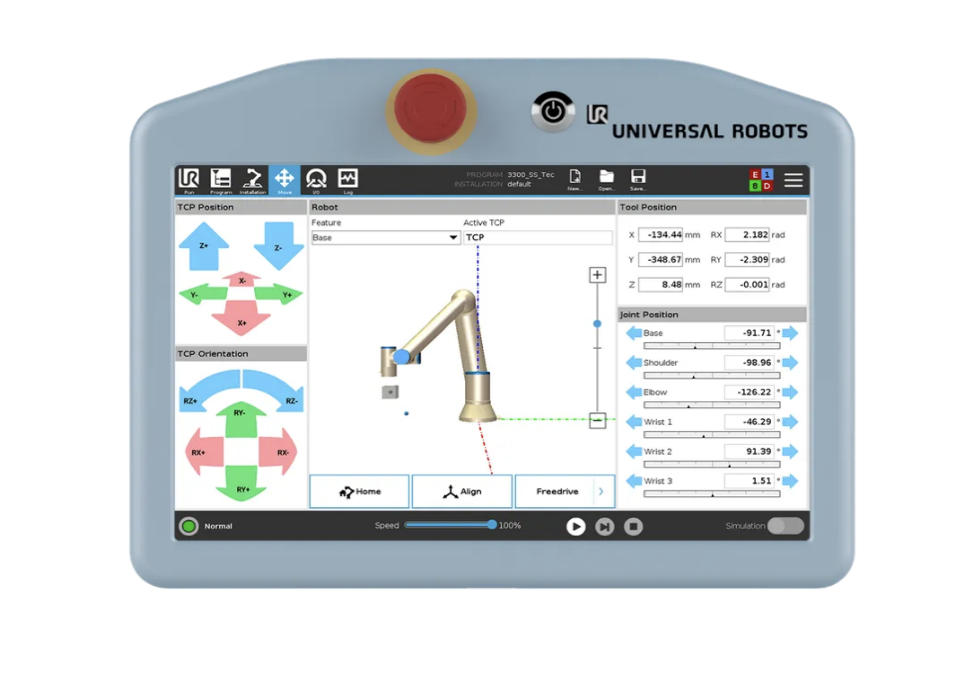
簡単なプログラミング
ロボット未経験の方でも短期間に習得できる、直感的な独自のインターフェースを搭載。
ロボットアームの動作は矢印のボタンによるジョグ操作はもちろん、手で直接操作するダイレクトティーチも対応。プログラミング工数を削減でき、導入後も柔軟に修正が可能です。
迅速なセットアップ
安全機能を内蔵した軽量・コンパクトなURロボットを用いることで、安全機器を最小化し、ロボットセルを簡易化・省スペース化が可能です。その結果、従来のロボットでは数か月かかっていた設計・立ち上げ工数を大幅に短縮できます。
そのため、立ち上げのためのライン稼働停止の時間を短縮することが可能になり、早期に自動化することができます。

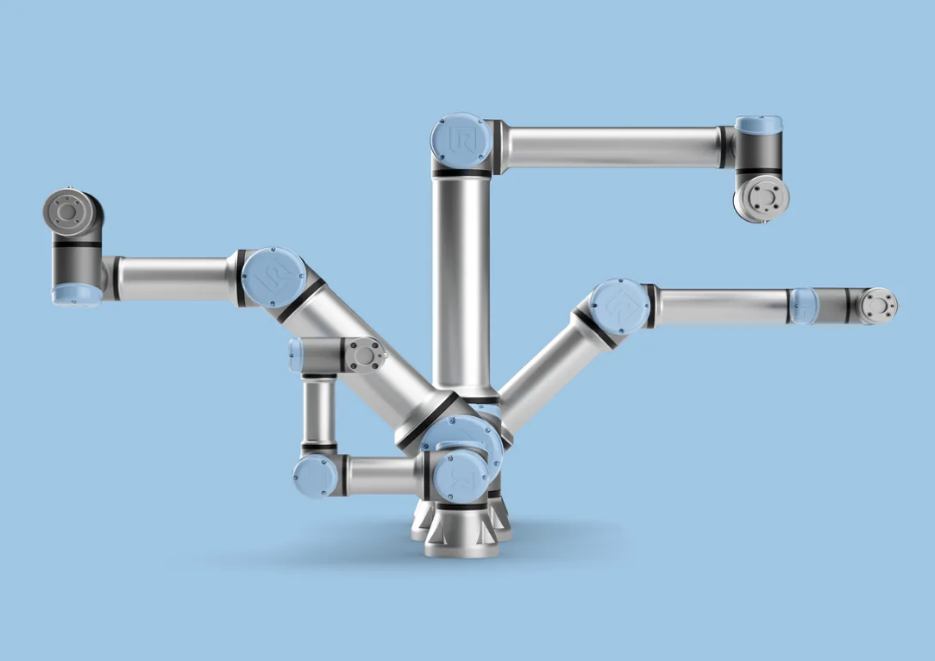
柔軟に配置可能
軽量・コンパクトで、広い可動範囲を備えたURロボットは、さまざまな場所・用途で活用できます。導入時は生産ラインのレイアウト変更を最小限に抑え、様々な用途に対応して再配置も容易に行えます。
新しい工程への配置を迅速かつ容易に行うことができ、少量のバッチ生産や速やかな段取変更が必要な場合を含め、現在手作業で行っている多くの作業を自動化することが可能です。
安全に協働作業
人にとって負荷の高い仕事や単純作業をURロボットに任せることで、作業員を反復作業のストレスから解放し、事故を低減することができます。世界中で使用されている URロボットの80%は、リスクアセスメントを行った結果安全柵なしで、作業者のすぐそばで稼働しています。
URロボットの安全機能は、TÜV(ドイツ技術検査協会)によるCat 3, PL=d 認定を取得済みで高い安全性を有しています。

紹介動画
主な適用等
限られたスペースのための高速協働ロボット
UR15は、軽量設計とコンパクトな設置面積により、スペースが限られた環境でも柔軟に導入・運用が可能です。UR15は従来のURロボットと同様に、動作速度によらず安全機能は常時有効。現場のスペースや速度の要求に応じて最適な設定を適用できます。最新のロボット技術やAIを活用したプログラミングに対応するPolyScopeソフトウェアで駆動します。
移動コマンドのモーションパラメータを容易に最適化するUR独自のOptiMoveテクノロジーを搭載、立ち上げを簡素化し、業界で最高レベルの加減速のパフォーマンスを実現。さまざまな高速・高荷重アプリケーションに最適です。
さまざまな用途に対応する万能性
UR15のコンパクトな設計と最適化された作業領域により、あらゆる場所に容易に設置できます。TÜVおよびUL 1740の認証とIP65等級を備えており、厳しく規制された環境に適しています。
卓越した速度
UR15は当社最速の協働ロボットで、最大速度5 m/sを達成します。これにより、サイクルタイムの短縮と生産性向上を実現できます。
高度なモーションコントロール
OptiMoveテクノロジーは、与えられた荷重や安全設定などの条件をもとに、URロボットの速度と加速度を直感的に設定できるUR独自の機能です。移動コマンドの調整が容易で、滑らかな動作、サイクルタイムの短縮、振動の低減、精度向上を実現し、稼働率と生産性を最大化します。

用途
お客様の業種を問わず、貴社の設備や生産ラインにはユニバーサルロボットが活躍できる場所が必ずあります。
反復作業の自動化、危険な作業の代わり、または従業員の働き方変革などにお役立てください。

■用途のまとめ動画
仕様
General specification
| Payload | 15 kg (33.1 lbs) 17.5 kg (38.58 lbs) with boundary conditions according to manual. | |
| Reach | 1300 mm (51.18 in) | |
| Degrees of freedom | 6 rotating joints | |
| Programming | 12 inch touchscreen with PolyScope graphical user interface | |
| Maximum power | 550 W | |
| Moderate operating settings | 350 W | |
| Operating temperature range | Ambient temperature: 0-50˚C (32-122˚F) | |
| Safety functions | 17 configurable safety functions | |
| In compliance with | EN ISO 13849-1 (PLd Category 3), EN ISO 10218-1 and UL 1740 | |
| Joint architecture | 2-1-3 |
Performance
| Force sensing, tool flange/torque sensor | Force, x-y-z | Torque, x-y-z |
| Range | ± 150.0 N | ± 10.0 Nm |
| Precision | ± 7.5 N | ± 0.2 Nm |
| Accuracy | ± 8.3 N | ± 0.5 Nm |
Movement
| Max TCP speed | 5 m/s | |
| Pose repeatability per ISO 9283 | ± 0.05 mm | |
| Axis movement | Working range | Maximum speed |
| Base | ± 360° | ± 180˚/s |
| Shoulder | ± 360° | ± 180˚/s |
| Elbow | ± 360° | ± 240˚/s |
| Wrist 1 | ± 360° | ± 300˚/s |
| Wrist 2 | ± 360° | ± 300˚/s |
| Wrist 3 | ± 360° | ± 300˚/s |
Features
| IP Classification | IP65 | |
| Cleanroom classification ISO 14644-1 *Velocity and payload | Class 4 at ≤ 80% | |
| Noise | < 67 dB(A) | |
| Arm mounting | Light ring at robot base | |
| I/O Ports at tool flange Digital In Digital Out Analog In | 2 2 2 or 1 RS-485 | |
| Power supply voltage | 12/24V | |
| Power supply | 2 A (Dual pin) 1 A (Single pin) |
Physical
| Footprint | Ø204 mm | |
| Materials | Aluminium, Plastic, Steel | |
| Tool flange | ISO 9409-1-50-4-M6 | |
| Connector type | M8 | M8 8-pin (female) | |
| Cable length (robot arm) | 6 m(236 in) | |
| Weight without cable | 40.7 kg (89.73 lbs) | |
| Humidity | ≤ 90% RH (non-condensing) |