協働ロボットを活用しネジ締め自動化を実現する方法
製造現場におけるネジ締め工程は、品質への影響が大きい重要工程である一方、人手作業に依存しやすく、作業者ごとのばらつきや負担増といった課題を抱えています。こうした背景から、自動化のニーズは高まっていますが、専用機による完全自動化はコストや柔軟性の面で導入ハードルが高いのが実情です。
そこで注目されているのが、協働ロボットを活用したネジ締め自動化です。本記事では、協働ロボットを用いたネジ締め自動化の具体的な方法や構成、運用のポイントについて解説します。
目次
協働ロボットを活用しネジ締め自動化する方法
協働ロボットを活用したネジ締め自動化とは、ロボットにネジ締めツールや周辺機器を組み合わせることで、ネジの供給から締結、品質判定までの一連の作業を自動化する手法です。
この方式では、ロボット単体ではなく、ネジヘッド(電動ドライバー)、ネジディスペンサー、2Dカメラなどを連携させたシステムとして構築することが前提となります。これにより、位置ズレの補正や安定したネジ供給、トルク管理による品質担保が可能になります。
また、協働ロボットの特徴である安全性と柔軟性を活かし、人と同じ空間で稼働しながら工程の一部を自動化できる点も大きな利点です。既存ラインへの後付けや段階的な導入が可能であり、少量多品種生産や工程変更が多い現場において、現実的かつ効果的な自動化手法として活用されています。
ネジ締めロボットの構成要素と役割
協働ロボットを用いたネジ締めシステムは、複数の要素が役割分担しながら連携することで成立します。各構成要素の理解は、安定稼働と品質確保の両面で重要です。
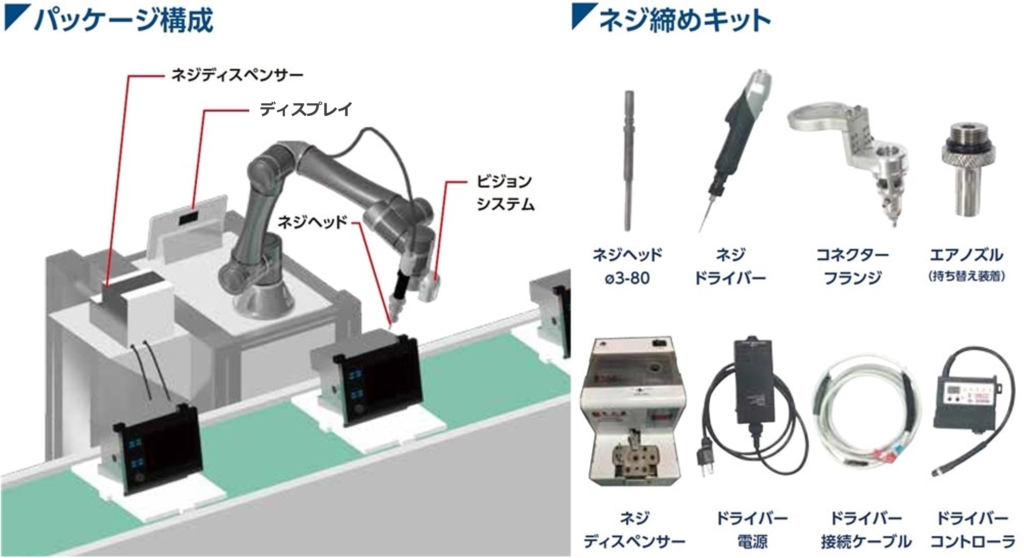
協働ロボット
ネジ締めポイント間を移動し、ツールを正確な位置へ搬送する役割を担います。人と同一空間での安全な稼働が可能であり、作業者との協働や工程の柔軟なレイアウト変更に対応できます。また、ティーチングによる動作変更が容易なため、品種切替にも強いという特徴があります。
ネジヘッド(電動ドライバー)
ネジ締め工程の品質を直接左右する中核機器です。トルクや回転数を精密に制御し、適切な締結状態を実現します。さらに、トルク値の監視により異常締結(ネジつぶれ・空回りなど)を検知することも可能であり、品質保証の観点から最も重要な要素といえます。
ネジヘッド(電動ドライバー)
ネジ締め工程の品質を直接左右する中核機器です。トルクや回転数を精密に制御し、適切な締結状態を実現します。さらに、トルク値の監視により異常締結(ネジつぶれ・空回りなど)を検知することも可能であり、品質保証の観点から最も重要な要素といえます。
ネジディスペンサー
ネジを1本ずつ安定して供給する装置です。供給の安定性は設備全体の稼働率に直結し、詰まりや供給ミスはライン停止の主要因となります。近年では水平搬送方式などにより、ネジ姿勢を安定させながら供給する仕組みが採用されています。
ディスプレイ
設備の状態表示、異常アラート、品種切替などを行う操作インターフェースです。締結結果や異常履歴の可視化により、現場での判断やトラブル対応を迅速に行うことができます。運用性の良し悪しは、このインターフェース設計に大きく依存します。
プログラム
ロボット動作、カメラ補正、締結条件、異常判定などを統合的に制御するシステムの中枢です。ネジ締め位置や条件を柔軟に変更できるため、多品種対応や工程改善において重要な役割を果たします。また、締結データの記録やトレーサビリティ確保にも関与します。
ネジ締めロボットの動作フロー
① ワークセット
作業者または搬送装置により対象ワークをセットします。協働ロボットを用いる場合、この工程は人との分担作業となるケースが多く、作業性と安全性の両立が求められます。
② 2Dカメラによる位置認識
カメラによりワークの位置や姿勢を取得し、ネジ穴の座標を認識します。治具精度に依存せずに補正できるため、ばらつきのある現場でも安定した自動化が可能になります。
③ ロボットの位置補正移動
取得した座標データをもとに、ロボットが補正された位置へ移動します。この工程により、ティーチング位置との差異を吸収し、正確な締結位置へ到達します。
④ ネジの取得(ディスペンサー連携)
ネジディスペンサーからネジを1本取得します。供給の安定性がこの工程の鍵となり、ここでのトラブルはそのまま設備停止につながります。
⑤ ネジ締結(トルク制御)
ネジヘッドにより設定されたトルク条件で締結を行います。適切なトルク制御により、締結品質を均一化し、不良発生を抑制します。
⑥ 締結結果の判定
トルク値や締結挙動をもとに、OK/NG判定を実施します。異常な締め付けは検知され、記録・通知される仕組みが一般的です。
⑦ 結果表示・記録
締結結果はディスプレイに表示されるとともに、ログとして保存されます。これによりトレーサビリティが確保され、品質管理の強化につながります。
⑧ 次工程または完了
次のネジ位置へ移動するか、すべての締結が完了した場合は工程終了となります。工程設計によっては、複数箇所を連続して処理することも可能です。
FAQ(よくある疑問と現場の実態)
ネジ締めで最もトラブルが多いのはどこですか?
ネジ供給(ディスペンサー)です。
実際の現場では、ロボット本体やドライバーよりも、ネジ供給部が最もトラブルの発生源になりやすい傾向があります。ネジが途中で詰まる、うまく送り出されない、複数本が同時に供給される、あるいは姿勢が乱れた状態で供給されるといった問題は頻繁に発生します。
これらのトラブルは一つひとつは小さく見えるものの、発生すると設備全体が停止してしまうため、生産性に与える影響は非常に大きくなります。そのため、ネジの形状や表面処理、供給方式の選定、さらにはエア圧や清掃性の確保といった細かい条件の積み重ねが、安定稼働の鍵を握ります。
重要なのは、ロボットや制御よりも、供給機構に十分な検討時間をかけるという視点です。ここを軽視すると、どれだけ高性能なロボットを導入しても安定稼働にはつながりません。
トルク管理をすれば品質は担保できますか?
トルク管理だけでは不十分です。
トルク値は締結状態を評価するうえで重要な指標ですが、それだけで品質を完全に保証することはできません。例えば、ネジが斜めに入ってしまった場合や、部品同士に隙間がある状態で締結された場合でも、結果として規定トルクに到達してしまうケースがあります。
そのため、実際の現場ではトルクに加えて、締結時の回転角度やトルクの立ち上がり方といったプロセス全体を監視することが重要になります。締結中の挙動を波形として捉えることで、通常とは異なるパターンを検知し、不良の早期発見につなげることが可能です。
ネジ締めの品質管理は「最終的な数値」だけではなく、「そこに至る過程」を含めて評価するという考え方が求められます。
協働ロボットのメリットは安全性だけですか?
本質は柔軟性と導入のしやすさです。
協働ロボットは安全性の高さが注目されがちですが、実際に現場で評価されているのは、工程への適応力の高さです。大掛かりな安全柵や設備を必要としないためレイアウト変更が容易であり、プログラム変更によって品種切替にも柔軟に対応できます。
さらに重要なのは、工程の一部だけを切り出して自動化できる点です。従来の専用機のように最初から完成形を目指す必要がなく、小さく導入して運用しながら改善していくことができます。この段階的なアプローチが、現場への定着を促進します。
協働ロボットは「完成された設備」ではなく、「運用しながら最適化していく設備」であるという理解が重要です。
カメラは必須ですか?
必須ではなく条件によっては不要です。
カメラはワークの位置ズレを補正できる便利なツールですが、その導入には調整や運用の負担も伴います。照明条件の最適化や誤検出対策、品種ごとの設定変更など、運用面での手間が増える点は見逃せません。
そのため、ワークの位置が安定しておらずバラつきがある場合には有効ですが、治具によって位置が確実に固定できる場合には、カメラを使わない方がシンプルで安定した運用が可能です。
現場では「カメラで解決する」のではなく、「機械的にズレをなくす」ことが基本となります。カメラはあくまで補助的な手段として位置づけるのが現実的です。
自動化で失敗しやすいポイントは?
いきなり完成形を目指すことです。
自動化の検討においてよく見られるのは、最初からフル自動化を前提とした設計です。しかし、ネジ仕様や品質基準が曖昧なまま進めたり、実際の作業者の動きを十分に考慮しなかったりすると、立ち上げに時間がかかり、結果的に現場で使われない設備になってしまうことがあります。
成功している現場では、まず手作業の工程を正しく把握し、その一部を半自動化するところからスタートします。その上で課題を洗い出し、改善を重ねながら徐々に自動化の範囲を広げていきます。
重要なのは、理想的な完成形を目指すことではなく、現場で確実に使われ続ける仕組みを構築することです。この視点の違いが、導入の成否を大きく分けます。
ネジ締めロボットパッケージの紹介
協働ロボットによるネジ締め自動化は、単なる省人化ではなく、現場に適応しながら進化できる柔軟な自動化手法です。重要なのは、設備単体ではなく「工程全体」として設計する視点です。
その点、パッケージ化されたソリューションを活用することで、機器選定やシステム構築の手間を抑えながら、短期間で安定稼働を実現できます。セレンディップ・ロボクロスが提供する「ネジ締めロボットパッケージ」は、協働ロボットやカメラ、ネジ供給装置などが一体化されており、導入後すぐに稼働できる構成となっています。
これからネジ締め工程の自動化を検討する場合は、こうしたパッケージを起点に、自社の工程に合わせて最適化していくことが、最も現実的かつ効果的なアプローチといえるでしょう。