バリ取りロボットの種類と選定|成功の鍵は工具との組み合わせと導入手順
製造業において、バリ取りは多くの製品で必要となる重要な工程です。切削加工や鋳造、樹脂成形などの工程では、加工後にエッジ部分へ不要な突起(バリ)が発生します。このバリを適切に除去しなければ、組立不良や製品品質の低下につながるだけでなく、作業者の安全性にも影響を及ぼす可能性があります。
一方で、バリ取り作業は手作業で行われるケースが多く、作業負荷の高さや人手不足といった課題を抱えている企業も少なくありません。そのため近年では、バリ取り工程の自動化を目的としてバリ取りロボットの導入を検討する企業が増えています。
しかし、バリ取り工程のロボット化は単純ではありません。バリの大きさや部品形状、加工方法によって最適なシステムが異なるためです。特に重要なのが、工具とロボット構造の適切な組み合わせです。
本記事では、バリ取りロボットの種類、工具との組み合わせ、さらに導入検討の基本手順について解説します。
目次
バリ取りロボットの種類(ロボット構造による分類)
バリ取りロボットにはいくつかの種類がありますが、大きく分けるとロボットの構造によって分類することができます。ロボット構造は加工の自由度や精度に大きく関わるため、用途に応じた選定が重要になります。
多関節ロボット

現在、バリ取り工程で最も広く利用されているのが多関節ロボットです。6軸ロボットに代表されるこのタイプは、人の腕のように自由度の高い動きが可能で、複雑な形状の部品にも対応しやすいという特徴があります。
特に自動車部品や鋳造部品などでは、ワーク形状が複雑になることが多く、多関節ロボットの柔軟な動作が大きなメリットになります。そのため、バリ取り自動化の現場では最も導入実績が多いロボット構造と言えるでしょう。
協働ロボット
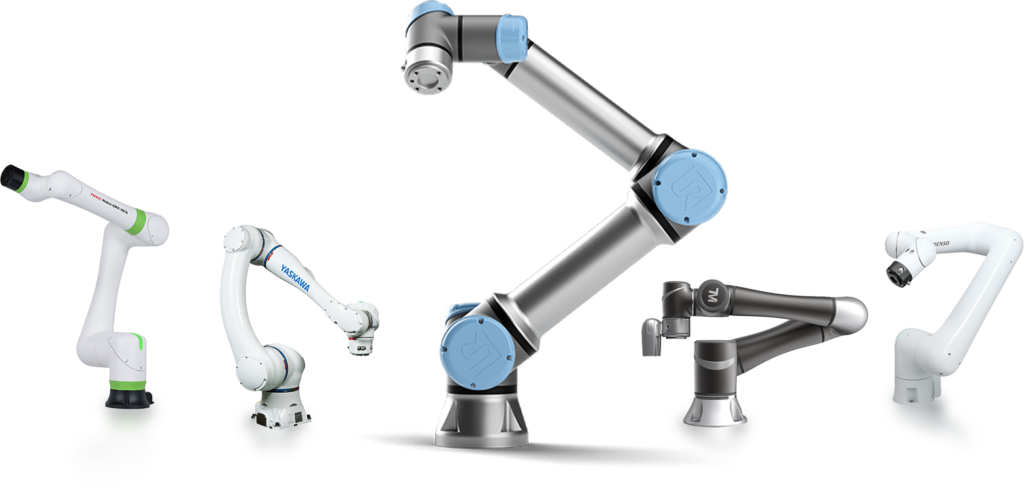
協働ロボットは、人と同じ作業エリアで稼働できる安全機能を備えたロボットです。比較的小型で設置スペースが小さいため、小型部品のバリ取りやセル生産ラインなどで活用されるケースがあります。
特に樹脂成形品など比較的軽負荷のバリ取り工程では、協働ロボットによってコンパクトな自動化設備を構築できる場合があります。
ガントリーロボット
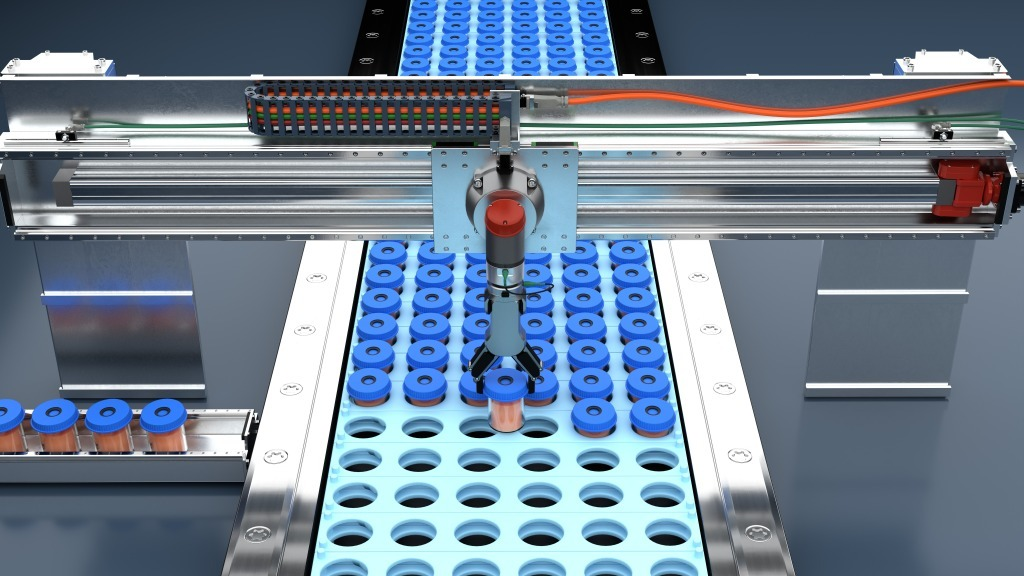
ガントリーロボットは直線軸で構成されるロボット構造で、高い剛性と安定性を持つことが特徴です。加工精度が重要となる工程や、大型部品の加工工程などで採用されることがあります。
特に切削工具を使用するバリ取りでは、ロボットの剛性が加工品質に影響するため、ガントリー型のような高剛性構造が選択される場合があります。
このように、ロボット構造によって得意とする用途が異なるため、ワーク形状や加工条件に応じた選定が重要になります。
工具 × ロボット構造の典型的な組み合わせ
バリ取りロボットの導入では、ロボット単体ではなく使用する工具との組み合わせを考えることが重要です。バリの状態や材質によって適した加工方法が異なり、それに応じてロボット構造も変わるためです。
以下は、代表的な工具とロボット構造の組み合わせ例です。
| 工具 | ロボット構造 | 主な用途 |
|---|---|---|
| ワイヤーブラシ | 多関節ロボット | 鋳造部品、アルミダイカスト |
| グラインダー | 多関節ロボット | 金属加工部品 |
| エンドミル | 高剛性ロボット / ガントリー | 精密部品 |
| ナイフツール | 協働ロボット | 樹脂成形品 |
| ウォータージェット | 専用装置 / ロボット | 内部バリ |
例えば、ワイヤーブラシやグラインダーを使用する研磨加工では、多関節ロボットの自由度の高さが活かされます。複雑な形状に対して工具を適切な角度で当てることができるため、多くのバリ取り工程で採用されています。
一方、エンドミルなどの切削工具を使用する場合は、加工時の振動を抑えるために高い剛性が求められます。そのため、ガントリー型ロボットや高剛性ロボットシステムが選択されるケースが多くなります。
また、樹脂製品のバリ取りではナイフツールを使用する場合があり、このような軽負荷の加工では協働ロボットとの組み合わせが適することもあります。
このように、バリ取り工程では用途に応じた工具とロボットの組み合わせを検討することが重要です。
適切なバリ取りロボットを導入するための手順
バリ取りロボットの導入を検討する際には、ロボットから選定を始めるのではなく、加工条件を整理することが重要です。バリ取り工程はワーク形状やバリの状態によって最適な方法が大きく変わるため、段階的に検討を進める必要があります。ここでは、バリ取り自動化を検討する際の基本的な手順を紹介します。
STEP1 バリの状態を確認する
最初に確認すべきなのは、対象となるバリの状態です。バリの大きさや発生位置、材質などによって適した加工方法は大きく変わります。
例えば、薄いバリであればブラシや軽い研磨で除去できる場合がありますが、厚いバリの場合はグラインダーや切削工具が必要になることがあります。また、ワークの形状によっては内部バリが発生する場合もあり、その場合はウォータージェットなどの特殊な加工方法が必要になることもあります。
このように、バリ取り自動化ではまず対象となるバリの状態を正確に把握することが重要です。
STEP2 加工方法(工具)を決める
バリの状態を確認した後は、それに適した加工方法を検討します。ここで選定するのがバリ取り工具です。
バリ取りでは、ワイヤーブラシやグラインダーといった研磨工具、ナイフツールによる削ぎ取り加工、エンドミルなどの切削工具など、さまざまな方法が使用されます。ワークの材質や必要な仕上げ精度によって適切な工具は異なります。
工具の選定は、加工品質だけでなく後に選定するロボット構造にも影響するため、非常に重要な検討項目です。
STEP3 ロボット構造を選定する
使用する工具が決まると、必要なロボット性能が見えてきます。そこで次に検討するのがロボット構造です。
例えば、複雑形状のワークに対して柔軟な動きが求められる場合は多関節ロボットが適しています。一方で、切削工具を使用するなど高い剛性が求められる場合は、ガントリー型ロボットや高剛性ロボットシステムが選択されることがあります。また、小型部品の軽負荷加工では協働ロボットが適するケースもあります。
このように、工具や加工条件に応じて適切なロボット構造を選定することが重要になります。
STEP4 周辺設備を検討する
最後に検討するのが周辺設備です。バリ取り自動化ではロボット本体だけでなく、ワーク固定治具や集塵設備、センサーなどを含めたシステム全体の設計が必要になります。
例えば、ワークを安定して保持する治具は加工品質に大きく影響します。また、研磨工程では粉塵が発生するため集塵設備の設置も重要になります。さらに、力覚センサーなどを活用することで、より安定した加工が可能になる場合もあります。
このように周辺設備まで含めてシステム設計を行うことで、安定したバリ取り自動化を実現することができます。
実際は「ツール技術」が重要になるケースも多い
バリ取りロボットの導入を検討する際、多くの人がロボット本体の性能に注目しがちです。しかし実際の現場では、ロボットよりもツール技術(エンドエフェクタ)の性能が重要になるケースも少なくありません。

バリ取り工程では、ワーク形状のばらつきやバリの個体差が存在するため、単純にロボットの位置制御だけでは安定した加工が難しい場合があります。そのため、工具側で加工状態を吸収する仕組みが重要になります。
例えば、バリ取り用のツールにはフローティング機構が備えられているものがあります。これは工具が一定の範囲で動くことで押し付け力を調整し、ワーク形状のばらつきに対応できる仕組みです。また、力覚制御機能を持つツールや研磨ユニットなどを活用することで、加工品質を安定させることができます。
このように、バリ取り自動化では「ロボット本体」「工具」「周辺設備」を一体として設計することが重要です。特にエンドエフェクタの選定は加工品質に大きく影響するため、導入検討の段階から十分に検討する必要があります。
バリ取り自動化ならセレンディップ・ロボクロスにお任せください
バリ取り工程の自動化は、生産効率の向上や作業者の負担軽減につながる一方で、加工条件に応じた適切なシステム設計が必要になります。バリの状態やワーク形状に応じて工具やロボット構造を選定し、さらに周辺設備を含めたシステム全体を構築することが求められます。
セレンディップ・ロボクロスでは、こうしたバリ取り自動化の課題に対して、豊富な知見をもとに最適なロボットシステムをご提案しています。ワークや加工条件を踏まえたロボット選定から、ツール設計、システム構築まで一貫してサポートすることが可能です。
バリ取り工程の自動化をご検討中の企業様は、ぜひお気軽にご相談ください。セレンディップ・ロボクロスが、貴社の生産現場に最適なロボットシステムの導入を支援いたします。